Тема измерения ускорения коленчатого вала давно будоражит мозги тюнеров, давайте рассмотрим по порядку основные моменты предыстории, которые побудили меня в частности заняться такими измерениями:
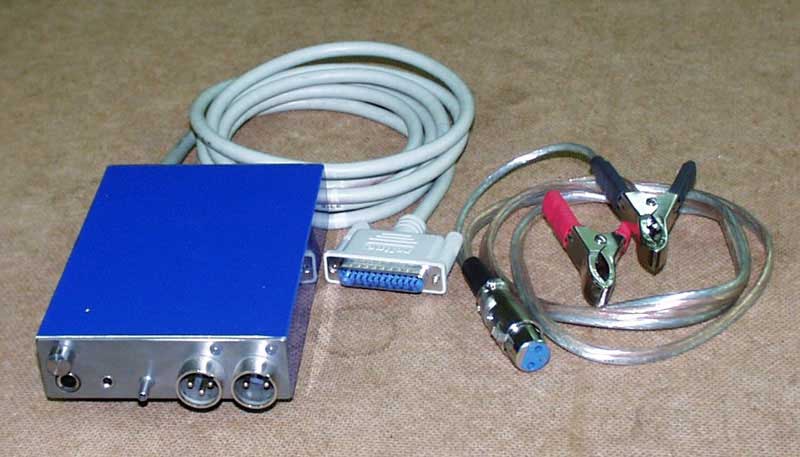
Первая известная мне практическая реализация подобной "измерялки" была разработана черт знает когда в ОКБ Двигатель, сейчас на сайте имеется только упоминание о ней http://www.raspredval.ru/index.phtml?page=2 включающее эту фотографию.
из фото можно понять что приборчик подключается к порту LPT компьютера. Кроме того в интернете доступны патенты которые положены в его основу которые в настоящий момент прекратили действие. http://www.fips.ru/cdfi/fips.dll?ty=49&docid=2280244&lb=1 http://www.fips.ru/cdfi/fips.dll?ty=49&docid=2004107858&lb=1
Прибор быстро распространился по дилерам - в частности вариант попал в Карбтюнинг и в Алекс Моторспорт. Следует сказать, что в момент реального появления прибора мы уже регулярно занимались замерами мощности двигателей ВАЗ в основном на колесном стенде BOSCH FLA-203 смонтированном в фирме АОЯМА моторс. И несомненно заявления "там какие-то... мощность мерят без всякого стенда" не могли не остаться без внимания. В это время инжекторные двигатели еще небыли так сильно распространены и проблематика их измерения не стояла. Вскоре эта тема затихла, но до сих пор можно встретить в форумах упоминание Динамик Мотор Тестера.
Следующий всплеск эйфории замеров был связан с разработкой программы PowerTest, Антоном Сагдаковым (Toxa_22171) о чем можно прочитать на форуме Аллента http://www.allent.ru/forum/showthread.php?s=&threadid=163 Cуть программы заключалась в подключении катушки зажигания (модуля) через резисторный делитель к входу sb. Программа обеспечивала запись разгона двигателя в файл wav с последующим анализом и построением графиков мощности и момента. Позже задачи измерения были возложены на микроконтроллер.
В 2004 году в журнале Микропроцессорные и цифровые системы выходит статья И.Н. Бурдинского. [1] c описанием программно-аппаратного комплекса для подобных измерений и физических принципов его работы.
Ну и наконец в конце 2006 года нас ждала очередная "реинкарнация ДМТ", это прибор "ПИК ТеxT", разработка Юры(turbo) из Билкона. Cуть разработки - в разрыв ДПКВ подключается АЦП в виде карты PCMCIA с частотой дискретизации 96кгц (кстати на 10000 оборотах с ДПКВ сигнал всего 10кгц идет и вообще-то он дискретный cам по себе, простейший компаратор и логика переполнения как описано в [1] работали бы проще и лучше, зачем там вообще нужен АЦП, да еще и с такими характеристиками... Впрочем оставим это разработчикам).
Множество аналогичных разработок оставим за кадром - но в интернете можно без труда их найти если поставить перед собой такую задачу.
Подробно описано в [1]. Мерим ускорение коленчатого вала, далее умножаем на момент инерции вращающихся масс (маховика c диском и корзиной сцепления, первичным валом кпп, коленчатым валом e.t.c) и получаем момент на валу двигателя, после этого умножаем момент на обороты и получаем мощность двигателя. Графически мощность и момент в зависимости от оборотов представляют собой внешнюю скоростную характеристику двигателя (ВСХ), именно ВСХ обычно является конечной целью таких замеров.
Обычно к машине подключается регистрирующее устройство (микроконтроллер и ноутбук). Двигатель на месте разгоняется до отсечки, при этом ускорение записывается и рисуется график.
Для начала остановимся на методике замеров мощности двигателя в условиях обеспечивающих метрологически верные данные. Для такого замера двигатель необходимо демонтировать из автомобиля и установить на специальный моторный стенд, замер производят в установившихся (стационарных) режимах работы как самого двигателя так и его системы управления, когда обороты двигателя расход воздуха, УОЗ, и др - постоянны и нагрузка составляет 100%. При этом снимают момент на валу двигателя как правило с помощью системы типа весов или тензометрического датчика на плече рычага, закрепленного на свободно вращающемся корпусе тормоза, постепенно уменьшая тормозной момент в тормозе плавно проходят весь ряд оборотов двигателя по внешней скоростной характеристике, считывая показания момента. После этого момент и рассчитанную на его основе мощность двигателя приводят к нормальным условиям, используя специальные формулы пересчета определенные государственным стандартом и включающие температуру воздуха и давление воздуха в помещении где проводятся испытания. Это необходимо чтоб минимизировать влияния погоды на результаты замеров и обеспечить повторяемость результатов в любых погодных условиях. Стоит заметить, что точность измерения момента двигателя в такой методике практически зависит исключительно от 2-х вещей, знания плеча рычага на котором происходит измерение силы (можно измерить с точностью до микрона) и точности весов измеряющих эту силу (5 грамм не проблема даже для бытовых весов, это на плече 1 метр даст точность 0.05нм). Указанная выше методика дает наиболее истинные данные.
Почему же измерение ускорения коленчатого вала в момент его раскрутки не отражает мощность двигателя:
1) Система управления работает в нестационарном режиме, поэтому момент полученный при измерении ускорения маховика и момент двигателя полученный на моторном стенде не будут иметь между собой ничего общего.
2) Исходя из 1 не имеет смысла решение проблемы поиска момента инерции вращающихся масс системы, путем моделирования распределения масс ее элементов, либо по упрощенной схеме (взвешивание и измерение линейных размеров), так как коэффициент должен не просто отражать момент инерции масс но и исправлять ошибки возникшие по причине первого пункта.
3) Измерение мощности двигателя колесным стендом на самом деле производится по эмпирическим методикам и не может быть использовано для получения вышеописанного коэффициента, поскольку саму мощность с колесного стенда нельзя считать истиной.
Кроме того измерять ускорение подобными методиками для некоторых двигателей попросту опасно. Поскольку алгоритмы отключения топливоподачи в двигателе позволяют при отсутствии нагрузки на двигатель сильно превышать планку оборотов отсечки, что может вызвать его механическое повреждение (вплоть до обрыва шатуна).
Остановимся подробнее на некоторых пунктах.
Принципы функционирования микропроцессорных систем управления двигателем и аналоговых систем управления несколько различны, это необходимо учитывать при проведении подобных измерений и чтоб нивелировать влияние не стационарности режима работы на результаты измерения. Либо понимать разницу, чтоб не проводить подобных измерений и не доверять их результатам (короче ерунда все это). Наиболее просто проблему описываемую в данном пункте можно объяснить на примере УОЗ двигателя. В аналоговой системе управления задающим устройством определяющим зависимость УОЗ от оборотов двигателя является механический распределитель - трамблер, характеристика УОЗ в таком двигателе определяется совокупно - начальным положением трамблера, весом грузиков и жесткостью пружинок в центробежном регуляторе. Основное свойство такой системы - изменение оборотов приводит практически к мгновенному изменению УОЗ. Микропроцессорная система управления реального времени не может обеспечить подобного изменения, поскольку построена на совсем других принципах. Она реализует конечное множество алгоритмов управления двигателем, что неизбежно приводит к возникновению задержек (их могут называть лагами) между отдельными событиями цепочке задач выполняемых в системе управления. Опишем подробнее как происходит установка УОЗ в микропроцессорной системе и откуда берется задержка:
Система управления должна определить обороты двигателя. Для такого определения она производит подсчет времени поворота коленчатого вала на 180 градусов. Если ускорение коленчатого вала = 0 - результат такого вычисления абсолютно точный (в пределах разрядности и точности таймера времени). Если движение коленчатого вала равноускоренное - результатом будут обороты КВ но с запаздыванием на 180/2 (90 градусов поворота) от момента их измерения. - это первая составляющая задержки.
Для расчета УОЗ система использует главный цикл вычислений, поскольку главный цикл вычислений синхронизирован с внутренней подсистемой времени и выполняется с интервалом 20мс - он может вносить в вычисление УОЗ задержку от 0 до 20мс.
Вычисленное значение УОЗ может использоваться не сразу, а с интервалом от 0 до 180 градусов поворота коленчатого вала, это связанно с тем, что передача данных в цикл управления зажиганием происходит в определенном угловом интервале - за 66 градусов до ВМТ..
Таким образом в случае вращения коленчатого вала с значительным ускорением или замедлением возникает динамическая ошибка по углу зажигания, максимальное значение которой определяется суммарным интервалом времени 0-20мс и интервалом поворота коленчатого вала на 90-270градусов.
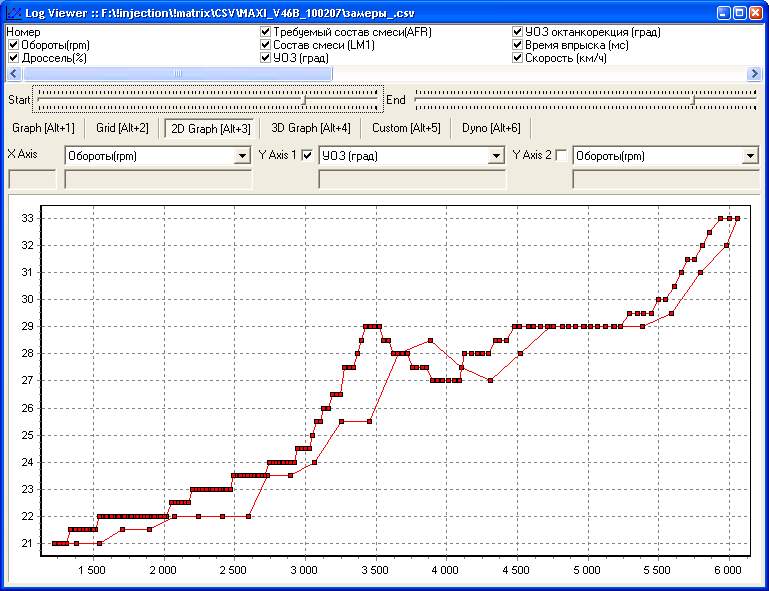
К сожалению построение модели для математического описания этой ошибки является довольно сложной задачей, поэтому было решено измерить эту ошибку опытным путем, что стало возможным в микропрограмме J5LS. В результате вы можете на графике наблюдать как запаздывает реальный УОЗ (разреженная линия) во времени от необходимого (плотная линия) при резком ускорении коленчатого вала нагруженного только моментом инерции маховика. Как видно на картинке, график сдвинут во времени и в некоторых точках по оборотам ошибка уставки УОЗ может достигать 4-х градусов. Тест показывает, что при ускорении коленчатого вала достигаемом при измерении реализуемый УОЗ запаздывает от требуемого примерно на 1-1.5 оборота КВ. (сдвиг на 250-400 rpm)
Естественно не стационарность наблюдается не только по оборотам двигателя, нагрузка при измерении тоже изменяется. В частности при открытии дросселя до 100% растет давление в задроссельном пространстве, в работу вступают механизмы дополнительной топливоподачи (ускорительный насос). Первые же опыты показали, что влияние ускорительного насоса в диапазоне оборотов до 3000 чрезвычайно велико, так например при циклических замерах с полным отключением ускорнасоса в диапазоне 1500-3000 rpm наблюдаются ускорения коленчатого вала 6-7 rpm/ms, если в начале измерения на оборотах 1200rpm задать 270ед топливоподачи ускорнасоса - уже к 1500 rpm наблюдаются значения ускорения коленчатого вала 9.5rpm/ms. Что означает рост момента двигателя в этом диапазоне более чем на 40% однако в циклических замерах появляется некоторая нестабильность в диапазоне около 2000 rpm.
Момент инерции вращающихся масс теоретически можно рассчитать моделируя детали двигателя на компьютере, практически же его получают методом так называемого "подгона под ответ". Для этого некий двигатель с набором определенного железа (в основном это конечно маховик так как практически только им определяется этот момент) замеряют по указанному выше методу, и тут же в составе автомобиля его замеряют на колесном мощностном стенде заслуживающем доверия (уже смешно, не правда ли). Полученная разница в графиках является "коэффициентом подгона под ответ для двигателя подобной конструкции" (не стоит путать с моментом инерции поскольку реально он имеет с ним мало общего).
Да, мы не можем точно померить ни мощность ни момент, но ведь ускорение то мы можем померить достаточно точно. И какую никакую - но маховик все же создает нагрузку. А следовательно мы можем изменяя параметры в системе управления оценивать их влияние на поведение двигателя по ускорению маховика. Основными параметрами влияющими на мощность двигателя заданными системой управления являются состав топливовоздушной смеси и угол опережения зажигания. Причем оценку влияния состава смеси достаточно сложно проводить в нестационарных условиях, кроме того критерии выбора составов определяются не только мощностью. C углом все немножко проще - оптимальный угол = максимальный момент. Практика показывает принципиальную возможность оценивать влияние УОЗ с достаточно высокой точностью - вплоть до 1-2 градуса, если учесть все ошибки вызванные работой двигателя в нестационарном режиме.
Автоматическая настройка УОЗ на внешней скоростной характеристике и возможно на режимах частичных нагрузок в атмосферном двигателе с микропрограммой J5LS.
Изобретатели подобных измерителей не имели возможности серьезно влиять на поведение системы управления и с достаточной скоростью получать информацию о ее состоянии, что накладывало ограничение как на повторяемость измерений, так и на саму методику измерения. Реализация части алгоритма измерения непосредственно в прошивке J5LS позволила не только управлять процессом измерения, но и менять влияющие на работу двигателя параметры между циклами измерений. Измерение производится следующим образом - вы нажимаете педаль в пол и все! Двигатель раскручивается до оборотов отсечки заданных в окне монитора "Матрицы", при этом ускорение коленчатого вала сохраняется программой, после наступления отсечки прошивка полностью блокирует топливоподачу двигателя, коленчатый вал вращается с замедлением, при достижении нижнего порога отсечки (обычно 1500rpm) топливо снова включается и создается добавка с помощью механизмов аналогичных "ускорительному насосу", для компенсирования отсутствия топливной пленки на стенках двигателя. Двигатель снова раскучивается. Так обеспечивается цикличность замеров для последующего усреднения их результатов. Программа может в процессе таких замеров снимать и запоминать в лог файле состояние необходимых переменных (уоз, лямбда, желаемый состав смеси, скорость автомобиля).
Измерение ускорения с использованием штатного протокола связи KWP2000 потребовало бы накапливать достаточно большой объем информации и обеспечивать его асинхронную передачу в ПК, что привело бы к излишней перегрузке главного цикла обработкой протокола KWP2000, к тому же не позволило бы передавать в ПК некоторые параметры системы управления необходимые для таких измерений. Поэтому встала задача создания двунаправленного протокола передачи данных по каналу K-Line с высокой скоростью но не загружающей ПО с возможностью переключения KWP2000 <-> новый протокол. Задача была реализована путем перекладывания функции master устройства на ЭБУ. Фактически ЭБУ с заданным периодом времени инициирует передачу кадра из памяти в канал K-Line. Прием начинается сразу же по окончании кадра. Скорость связи была выбрана 57600 бод, что позволяет передавать пакеты в 50 байт с интервалами 15мс практически не загружая микроконтроллер в эбу.
После достаточно долгих мучений, проб и ошибок был рожден следующий метод измерения ускорения коленчатого вала. Для измерения используются интервалы углового поворота коленчатого вала на 18 градусов формируемые задающим диском ДПКВ. Такой интервал выбран чтоб исключить влияние отсутствующих зубьев номер 59 и 60 на задающем диске. Для каждого интервала микропроцессором вычисляется время dT которое определяется как dT=T1-T0 где T0 время в начале интервала а T1 время в конце интервала. Время вычисляется с разрешением 6 микросекунд.
Для формирования информационного пакета используется накопление результатов опроса, методом последовательного суммирования интервалов с одновременным подсчетом числа зубьев N, dTsumm=dT1+dT2+....dTn суммирование происходит до тех пор, пока значение в сумматоре не превысит заданный в калибровке прошивки интервал времени (21.504мс). dTsumm > 21.504ms. Как только это произойдет - будет сформирован кадр для передачи в компьютер, а процесс накопления данных начнется заново. Реальные данные показывают, что dTsumm может колебаться в пределах 21.543 - 24.522 мс. от заданного из за реализации обработчика в цикле ДПКВ.
Информационный пакет передаваемый в компьютер содержит:
dTsumm - интервал времени с точностью 6 мкс.
n - угол поворота коленчатого вала за указанный выше интервал в градусах * 18.
а также прочие параметры системы управления (УОЗ, состав смеси, лямбда, работа "ускорительного насоса").
Интервал 21.504мс был выбран после серии практических опытов, он позволяет получать график ускорения с числом точек 31-40 и достаточно неплохим распределением, для анализа результатов измерения как в ручную так и автоматически с помощью компьютера.
Для обеспечения лучшей повторяемости графиков в режиме замера прошивка блокирует механизмы смещения УОЗ по детонации и ограничения скорости изменения УОЗ, поскольку было замечено, что они сильно влияют на стабильность последовательных замеров.
Для расчета ускорения и оборотов двигателя ПАК "Матрица" использует 2 информационных пакета полученных от эбу - текущий dT1 N1 и предыдущий dT0 N0. Математически расчет ускорения производится следующим образом:
RPM1=500000 * N1/dT1
RPM0=500000 * N0/dT0
RPM=(RPM0+RPM1)/2
a=(RPM1-RPM0)*2/(dT0+dT1)
UOZ=(UOZ1+UOZ0)/2
Где: a - ускорение коленчатого вала (RPM за секунду).
RPM - обороты коленчатого вала.
UOZ - угол опережения зажигания.
Однако после тестирования и анализа графического влияния реализуемого УОЗ на ускорение маховика было решено немножко изменить методику, чтоб обеспечить более точное отражение вклада УОЗ в составляющую ускорения КВ, это обеспечивается небольшой задержкой оборотов и УОЗ относительно ускорения коленчатого вала: RPM=RPM0 ; UOZ=UOZ0
Для обеспечения работы программы в автоматическом режиме необходимо изменять УОЗ в процессе замера, чтоб в последствии иметь возможность выбрать оптимальный УОЗ анализируя влияние таких изменений. Для этого в программе реализованы функции определения факта ускорения или замедления коленчатого вала, чтоб вести селекцию циклов измерений и обеспечивать заданное число циклов с нужным УОЗ. Так же в программе задаются пределы и шаг изменения УОЗ. Автоматику изменения УОЗ можно отключить, если целью измерения является например снятие логов топливоподачи с высокой скоростью или наблюдение за работой П регулятора УОЗ на холостом ходу...
В момент измерения никакой дополнительной обработки не предусмотрено, все данные просто сохраняются в log файле и отображаются в окне осциллографа.. В дальнейшем этот файл может быть проанализирован с помощью специальной функции ПАК "Матрица". Алгоритмы анализа файла реализуют следующие задачи:
1) Выделение из лога отдельных последовательных замеров (циклов ускорения двигателя) и отброс всех незначащих и ошибочных данных.
2) Сглаживание полученных графиков замеров по 7 точкам. (картинка иллюстрирует работу функции сглаживания)
3) Селекция замеров произведенных в одинаковых условиях (по смещению УОЗ и положению дросселя), фильтрация методом скользящее среднее, для получения результирующего графика момента, соответствующего выбранным условиям с одновременным приведением графика в координаты сетки оборотов загруженной микропрограммы J5LS с разрядностью 32 точки по оборотам.
Вот реальный пример таблицы полученной на этом этапе. (отсечка 6000)

В таблице четко видно как изменяется ускорение коленчатого вала при смещении уоз от некоторой позиции на +6 -6 градусов. Очень сильно сказывается влияние УОЗ на низких оборотах. На высоких оборотах вклад уоз в момент двигателя не так велик.
4) Отброс данных в точках на краях графиков, если имеет место основание считать их недостоверными (контроля отклонений крайних значений момента от значений полученных путем экстраполяции графика) В данном случае точка 6000 будет отброшена! Так же специальным алгоритмом отбрасываются точки в которых при тесте была обнаружена детонация.
5) Сохранение всех промежуточных результатов обработки в виде коротких лог файлов CSV для контроля алгоритмов обработчика.
6) Поиск оптимальной поправки текущей характеристики УОЗ для каждой режимной точки двигателя, по максимальному крутящему моменту, при этом если рост момента с увеличением угла не составляет более 2% - будет выбран заведомо поздний угол! Например для точки 4520 максимальный момент достигается на смещении 6 градусов (10.635), однако в результирующем отчете смещения не будет, поскольку 10.546/(10.635/100)=99.1% что составляет менее 2% по моменту двигателя - следовательно с точки зрения некоторого запаса по УОЗ не имеет смысла делать в этом месте угол раньше на целых 6 градусов ради получения прибавки всего 0.9% по моменту.
7) Переход от шага сетки 32 точки по оборотам в шаг сетки 16 точек по оборотам (стандартный шаг в таблицах зажигания J5LS) с использованием функции фильтрации учитывающей значения в соседних точках.
8) Формирование отчета с предложением оператору ПАК "Матрица" заменить калибровки УОЗ в прошивке ЭБУ в автоматическом режиме.
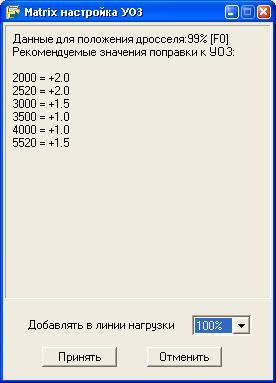
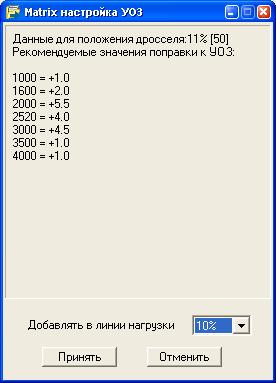
При нажатии клавиши "Принять" новые значения УОЗ немедленно будут записаны в инженерный ЭБУ. Программа позволяет производить настройку УОЗ как на полных (100% дросселя) так и на частичных нагрузках.
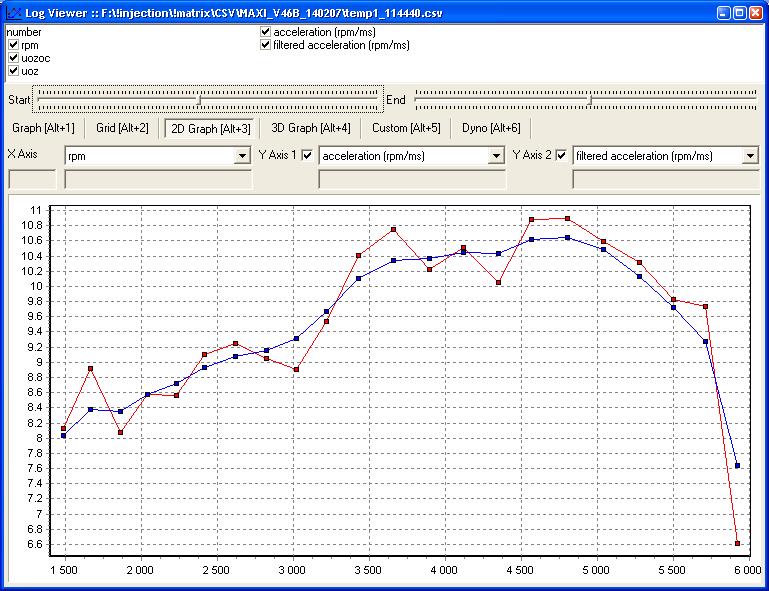
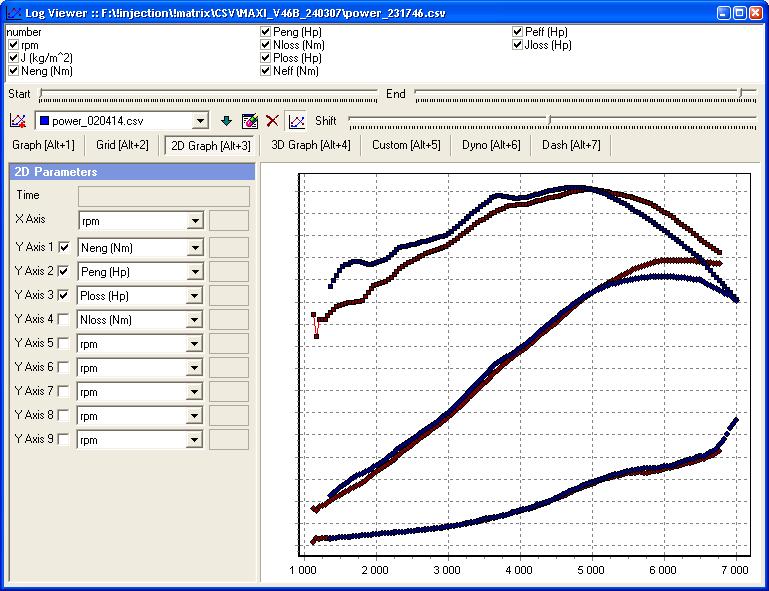
Естественно имея такую игрушку на определенном этапе чешутся руки простыми математическими действиями получить пусть не точно - но мощность и момент. ;) Зачем это надо - да хотя бы затем, чтоб определять оптимальные положения распределительных валов в автомобиле. Для этого для каждого двигателя вводится константа Jприв - приведенный момент инерции вращающихся деталей двигателя, которая может быть подобранна экспериментально или просто взята одинаковой для всех двигателей (нас ведь интересуют относительные значения которые являются результатом изменений, за абсолютными надо будет съездить на моторный стенд). Кроме того поскольку комплекс позволяет снимать лог не только разгона но и торможения - может быть определена совокупная мощность механических потерь. Итак на картинке результат 2-х замеров. Бордовый - с распределительными валами в штатных метках (мощностная настройка), а темно-синий - с распределительными валами вперед на ползуба по шестерне (моментная настройка). На графиках отчетливо видно как уменьшился момент с 1000-5000 и вырос с 5000-7000 при смещении валов. Нижняя линия - мощность совокупных механических потерь в двигателе. Причиной некоторого уменьшения механических потерь при "мощностной" настройке распределительных валов является снижение общего сопротивления на впуске и таким образом снижение насосных потерь в двигателе, которые являются частью механических потерь.
Наблюдение, анализ результатов, проверка на вменяемость и совершенствование алгоритмов настройки УОЗ для получения информации о целесообразности практического применения описанной методики для настройки атмосферных двигателей. Как только алгоритмы настройки УОЗ будут полностью протестированы и выйдет релиз микропрограммы J5LS_L46 - функции замера ускорения станут доступны пользователям ПАК "Матрица".
Юре (turbo) - за идею заняться такой фигней ;)
Антону Сагдакову - за консультации по основным вопросам алгоритмов измерения по ICQ и проявленный интерес к проекту.
Evo2 - за тестирование на ВАЗ-2106.
[1] http://www.amursu.ru/ics/ics_pdf/N07_15.pdf
[2] dynostend.pdf
(c) Maxi(RPD) 2007-2008 Копирование материалов ресурса без разрешения автора запрещено.