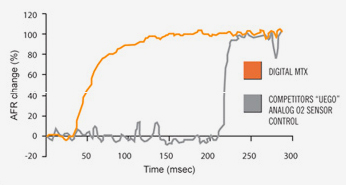
В Марте 2013 появилась идея проверить динамику работы контроллеров ШДК AEM в сравнении с Innovate LC-1. В принципе тормознутость AEM была известна задолго до этого теста, она замечалась при настройке машин с контроллером AEM UEGO когда одновременно были включены и активны обе лямбды LC1 и AEM, однако в форумах до сих пор встречаются упертые личности которые отрицают это, так например в марте на Drom на очередном обсуждении http://forums.drom.ru/gt-forum/t1151932376.html я привел довольно общеизвестный рисунок, сравнения технологии контроля ШДК AEM и Innovate.
Рисунок чрезвычайно возмутил владельцев АЕМ-а, вызвав у них очередной приступ батхерта. В итоге я решил сделать еще одно независимое исследование того, что и так всем известно и просто купил новый контроллер AEM UEGO по оптовой цене, чтоб уже в тепличных условиях самому измерить его реакцию.
Для начала стоит понимать, что оба контроллера работают принципиально по разному на уровне методики. Оба прибора производятся и продаются в США и очевидно обладают патентной чистотой. АЕМ использует классический PID регулятор для которого выходом является ток ячейки насоса (Ip) а ошибкой - отклонение напряжения в sense ячейке от базовых 0.45v, лямбда соответственно является функцией тока накачки Lambda=f(Ip) c коррекцией по калибровочному резистору. У Innovate совершенно другой собственный алгоритм, про него лучше всех расскажет один из разработчиков оборудования Innovate - Klaus, (перевод мой, исходный текст взят с форума innovate):
Приборы LM-1 или LC 1 не используют функцию лямбда=f(Ip), они используют
абсолютно другой способ определить Лямбду, не основанный на измерении
Ip. Как вы знаете, функция Лямбда = f (Ip) от сенсора к
сенсору меняется, и разные производители контроллеров
ШДК и систем управления используют разные "стандартные" калибровочные
f(Ip). Калибровочный резистор в сенсоре позволяет внести поправку для конкретного датчика - но к сожалению только в одной точке (фабричная калибровка при лямбда=1.7)
LM-1/LC-1 используют запатентованный innovate принцип измерения. На ячейку pump подается постоянный положительный
Ip, как только потенциал на ячейке sense станет немного выше 0.45v - Ip реверсируется и на pump ячейку подается отрицательный потенциал, пока sense не станет немного ниже 0.45v. После чего цикл повторяется. . Поскольку для данного датчика скорость потока постоянна при постоянном значении Ip вы имеете колебания полярности с частотой 50-200Hz (LM-1) или 100-500Hz
(LC-1). Газ в камере измерения меняется в небольших количествах, эти изменения сосредоточенны вокруг точки стехиометрии. Скорость колебания тока, и скорость измерения, зависит от реакции датчика, а не от контура обратной связи.
Это - базовые принципы сигма дельта АЦП. "Компаратором" - является sense ячейка, "обратная связь D/A" - является ячейка
pump, а "интегратором" - камера измерения. За исключением того, что в этом случае аналоговое значение - непосредственно выхлопные газы, а не напряжение или ток.
Ячейку насоса рассматривают как полупроводник с низкой подвижностью (по сравнению с кремнием или
GaAs).
Duty cycle (DC) рассчитывается как DC=(t1 - t2) / (t1 + t2). Таким образом, диапазон +-1.
Времена t1 и t2 измеряются с 16ти битной точностью.
Лямбда может быть рассчитана по содержанию O2 в выхлопных газах.
Лямбда = (O2 % воздуха) / (O2 % воздуха - O2 % выхлопа) или:
Лямбда = (парциальное давление O2 в воздухе) /(парциальное давление O2 в воздухе - парциальное давление O2 в выхлопе.)
Математический эквивалент нашего принципа, управления с постоянным Ip и колеблющимся знаком:
Лямбда = DCair / (DCair - DCexhaust).
DCair (duty cycle в воздухе) - то, что LM-1/LC-1 измеряют и запоминают в течении калибровки на свободном воздухе! Это значение меняется если меняется парциальное давление кислорода в воздухе. Но
поскольку используются одновременно и положительные и отрицательные токи и, Лямбда, изменяется намного меньше, чем с прямым Ip базированным измерением. Отклонение связанно с различиями в эффективности
ячейки насоса (функция атмосферного давления) между положительным и отрицательным
Ip, не полным отклонением Ip как функция атмосферного давления. Калибровка по свободному воздуху позволяет исключить влияние высот над уровнем моря и давлений воздуха. Если смесь богатая - DCexhaust становится отрицательным. Это эквивалентно виртуальному недостаточности O2 по сравнению с стехиометрией, или может быть замечено как виртуальное отрицательное парциальное давление О2. Из-за различия энергий активации для каталитического окисления и
восстановления, коэффициент для приведения результатов испытания к стандартным условиям должен быть применен к вышеупомянутой формуле для Лямбды при использовании "отрицательных" парциальных давлений. При работе с калибровочными газами и различными датчиками
(NTK Bosch) в различных условиях при различном использовании, мы обнаружили, что коэффициент для приведения результатов испытания к стандартным условиям,
это 6-ти значная константа (одинаковая для
датчиков Bosch и NTK).
Преимущества этого принципа измерения:
a) Максимальная задержка измерения, для корректного отображения 2 цикла, а не приблизительно 5*T63 для аналогового Ip измерения (для ошибки измерения <1 % при смене шага). Типичный быстрый аналоговый Ip измеритель имеет T63 приблизительно 100msec.
(T63 - время определяемое изготовителем измерителя на основе аналогового
Ip.)
b) Независимость от допусков функции Lambda=f(Ip) в конкретном датчике.
c) Низкий over/under swing.
d) Нет необходимости "настройки" PID
регулятора для критического демпфирования. Которую так или иначе невозможно сделать правильно, потому, что скорость реакции датчика с возрастом падает, (датчик стареет).
e) Пере калибровка затрагивает весть диапазон измерений а не только
одну точку. Калибровка корректна для текущего датчика и текущих атмосферных условий.
f) Независимость от датчика или допусков в аналоговой части.
Производится измерение в основном времени, независимое от электрических допусков. Измерение времени
с сегодняшними кварцевыми резонаторами возможно с точностью до <6 ppm в то время как
никакие аналоговые сигналы не возможно измерить точнее 1-2 %.
g) Отсутствие шума в диапазоне около стехиометрии. Поскольку Лямбда = f
(Ip) обладает высокой чувствительностью в стехиометрии, системы
базированные на Ip имеют тенденцию создавать помехи в виде шума при измерении в диапазоне лямбда около 1.0.
h) Отсутствие чувствительности к "продувке богатой смесью". Согласно исследованию
Bosch, углерод или другие частицы в богатом выхлопе могут быть
электростатически абсорбированы поверхностью насосной ячейки и частично закрыть ее при работе двигателя на смесях <0.8. Это как правило приводит к медленному дрейфу Ip к более высоким значениям, хотя смесь остается богатой,
потому что контур обратной связи должен компенсироваться
из за более низкой активной поверхности.
Решение, снова согласно исследованию Bosch, состоит в том, чтобы время от времени инвертировать ток насоса время в богатой смести, чтобы сбросить
абсорбированные частицы. Изменение тока насоса - уже часть нашего принципа измерения, поэтому частицы не могут электростатически
абсорбироваться. Кроме того, даже если бы они каким то образом
и появились - в результате
изменилась бы частота цикла (время реакции
сенсора) а не его duty (критерий показателей
смеси).
Klaus (innovate motorsport).
Ссылка на оригинальный патент в базе google с полным и подробным описанием метода и прибора его реализующего на английском языке http://www.google.com/patents/US6978655
AEM не порадовал с ходу, для начала он как оказалось принципиально не видит смесей богаче 10.0 тот же Innovate в теории способен увидеть 7.3 а на практике я точно помню что видел смеси около 8.7-9.0 без проблем - а это достаточно важный участок диапазона в некоторых случаях. Т.е. при настройке с AEM ориентироваться на смеси 10.0 и богаче нельзя в принципе поскольку любая смесь богаче 10.0 в конечном счете отображается как 10.0, все это не лучшим образом влияет и на время настройки.
Так же смутил всего один десятичный знак после точки в выводе на последовательный порт, т.е. дискретность показаний AFR=0.1, у инновейта дискретность вывода = 14.7/1000=0.0147 т.е. она превышает дискретность АЕМ аж на порядок!
Ну ладно - это все лирика, пора мерить динамику приборов.
Принцип действия собранного на скорую руку стенда для измерения динамики сенсоров следующий. Камера куда вкручены 2 зонда ШДК продувается сжатым воздухом. Затем с помощью трехвходового клапана канал воздуха запирается и в камеру подается референсная смесь газов соответствующая показаниям по составу смеси примерно 14.7+-, показания обоих датчиков (причем для innovate - по обоим аналоговым каналам) считываются с помощью микроконтроллера с АЦП и передаются по протоколу USB 2.0 в PC вместе с метками реального времени, логи выводятся в CVS формате, обрабатываются в excel и ecuedit. Как вариант 2-м газом выступает пропан-бутан в котором смесь на пределе является максимально богатой.
Вид стенда для тестирования ШДК.
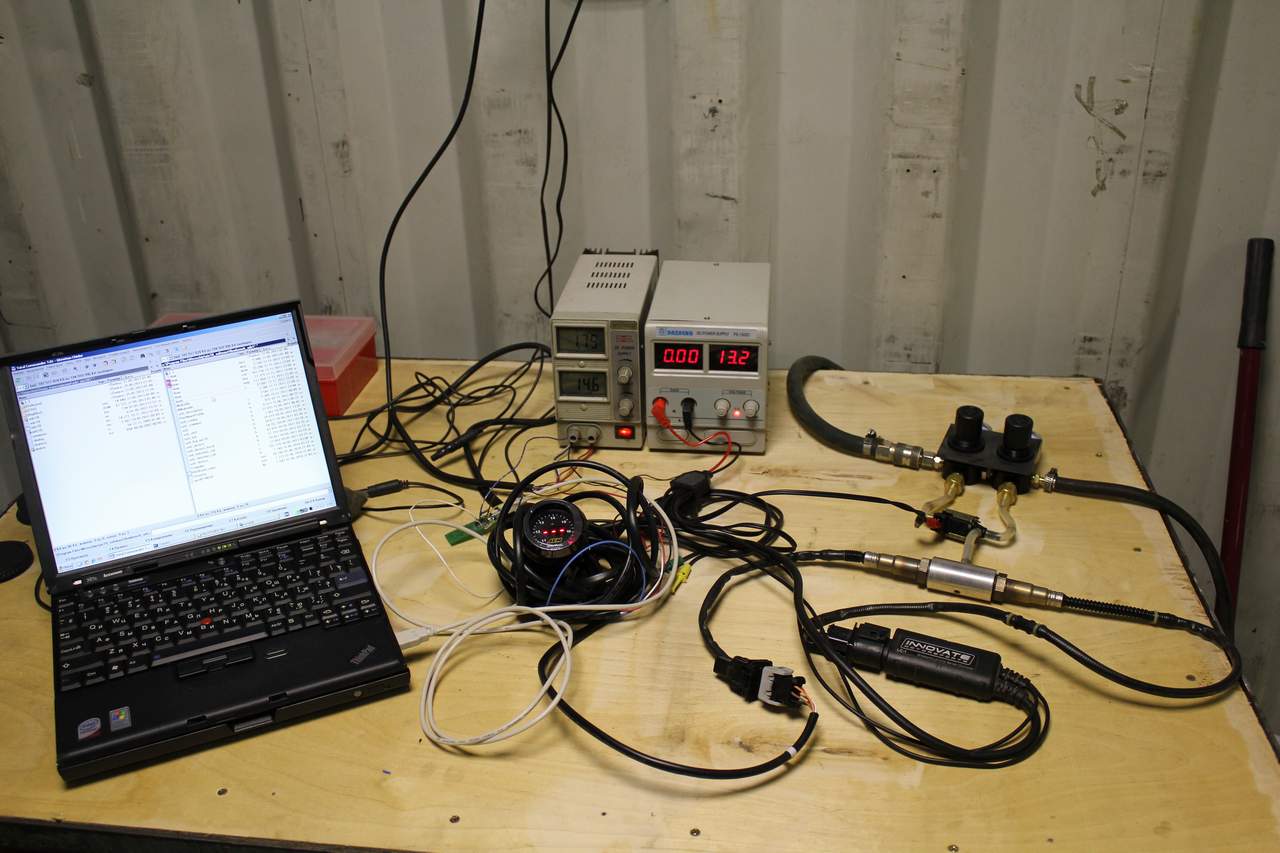
Редукторы тестовых газов для регулировки расхода и давлений.

Трехвходовой клапан и адаптер для 2-х ШДК Bosch.

Контроллер ШДК Innovate LC-1.

Контроллер ШДК AEM Uego.

4-х канальный AЦП с USB 2.0.

Источники питания контроллеров ШДК и клапана.
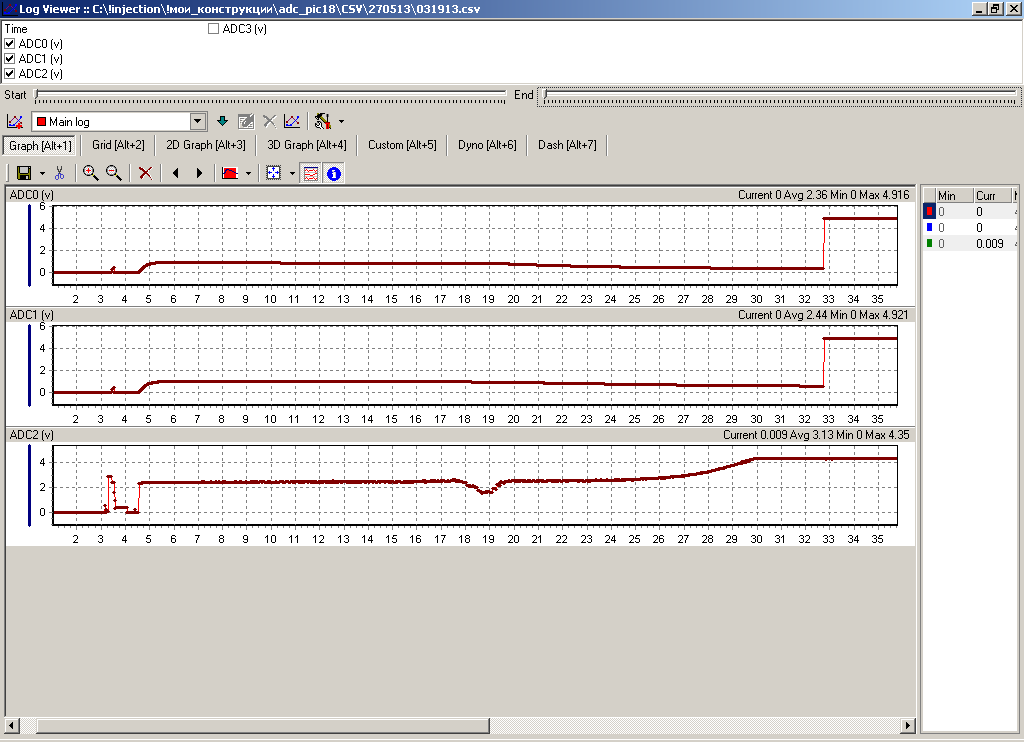
Прогрев обоих зондов. Питание подано на метке времени 3.5сек Innovate прогревался немного дольше до 33сек AEM на 3 сек быстрее с артефактным глюком в показаниях на 19 секунде...
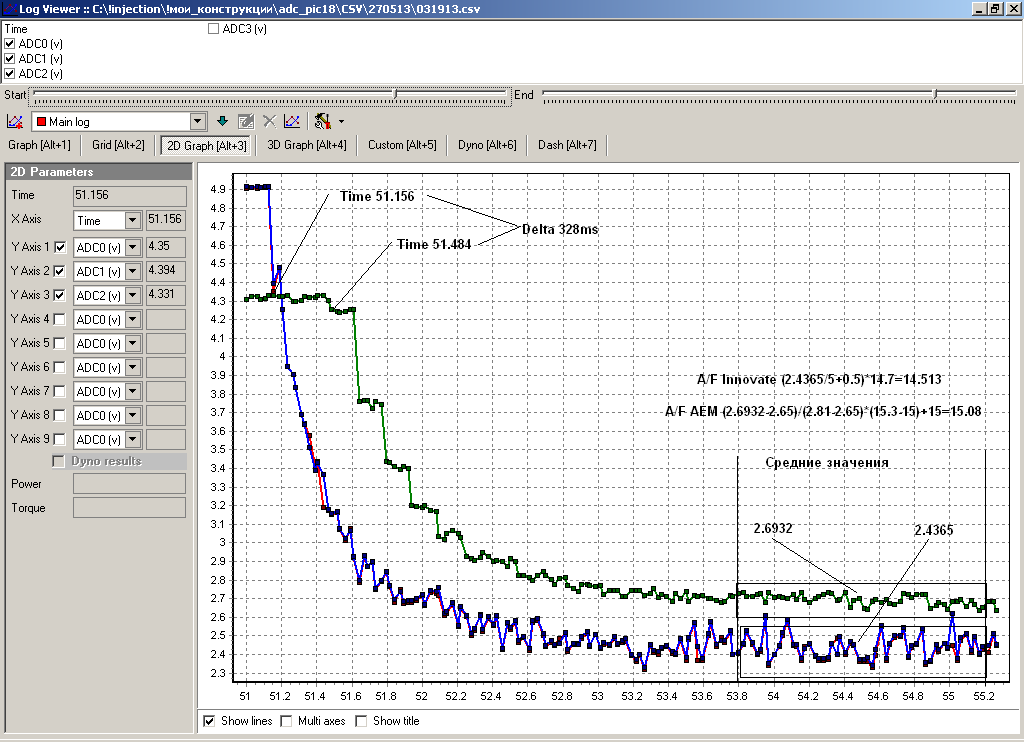
Ну и собственно главная картинка ради чего все и делалось. Что бы вы думали - задержка в реакции у AEM относительно Innovate не 200мс (как в рекламе innovate) а целых 328мс - т.е. все на самом деле гораздо хуже чем могло бы казаться и поэтому отсутствие реакции на топливо ускорнасосов теперь очень просто подтверждается опытом. Так же следует заметить про показания в установившемся состоянии - они разные и сильно. Я не буду сейчас затрагивать вопрос у кого они точнее - пока у меня нет никаких механизмов это определить. Возможно позже...
Так же обратим так же внимание на участок 57-66 сек - состав смеси там естественно никак не меняется, однако по нему можно оценить качество информации о нем с обоих приборов.
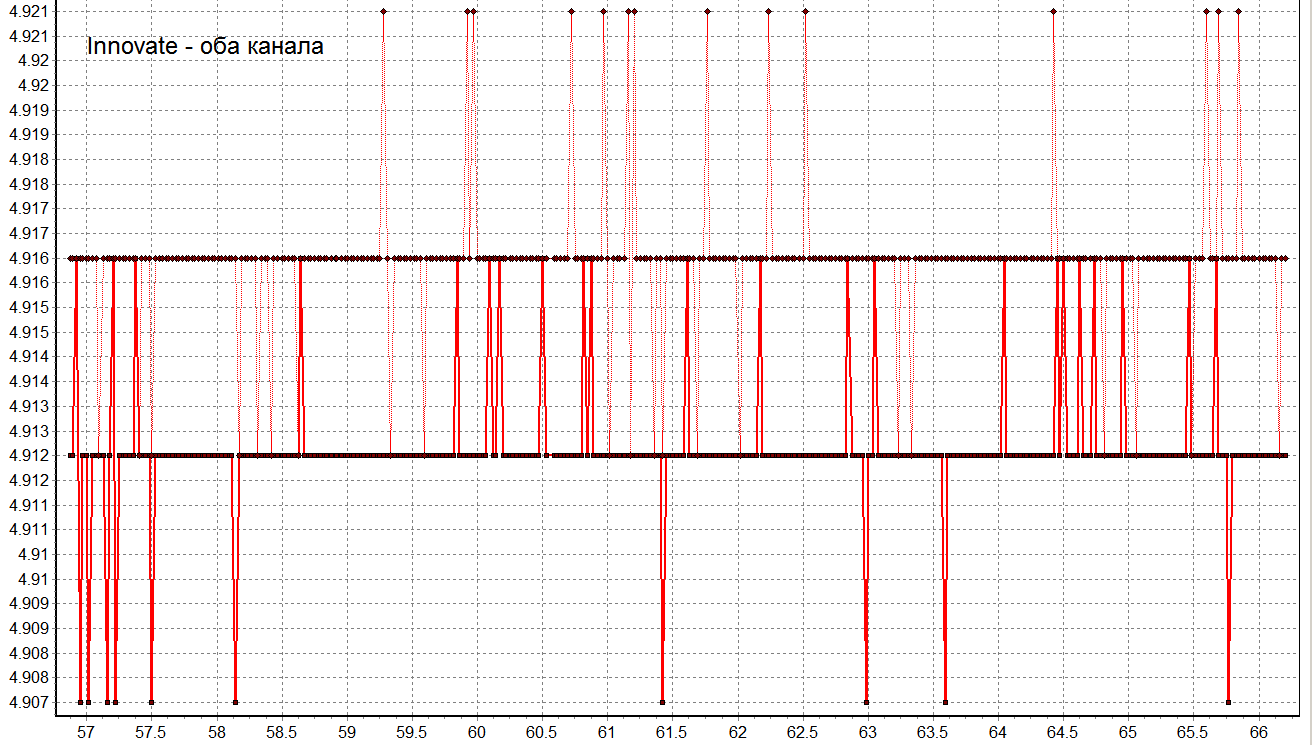
В обоих каналах АЦП подключенных к innovate дисперсия +-2 дискреты измерения.
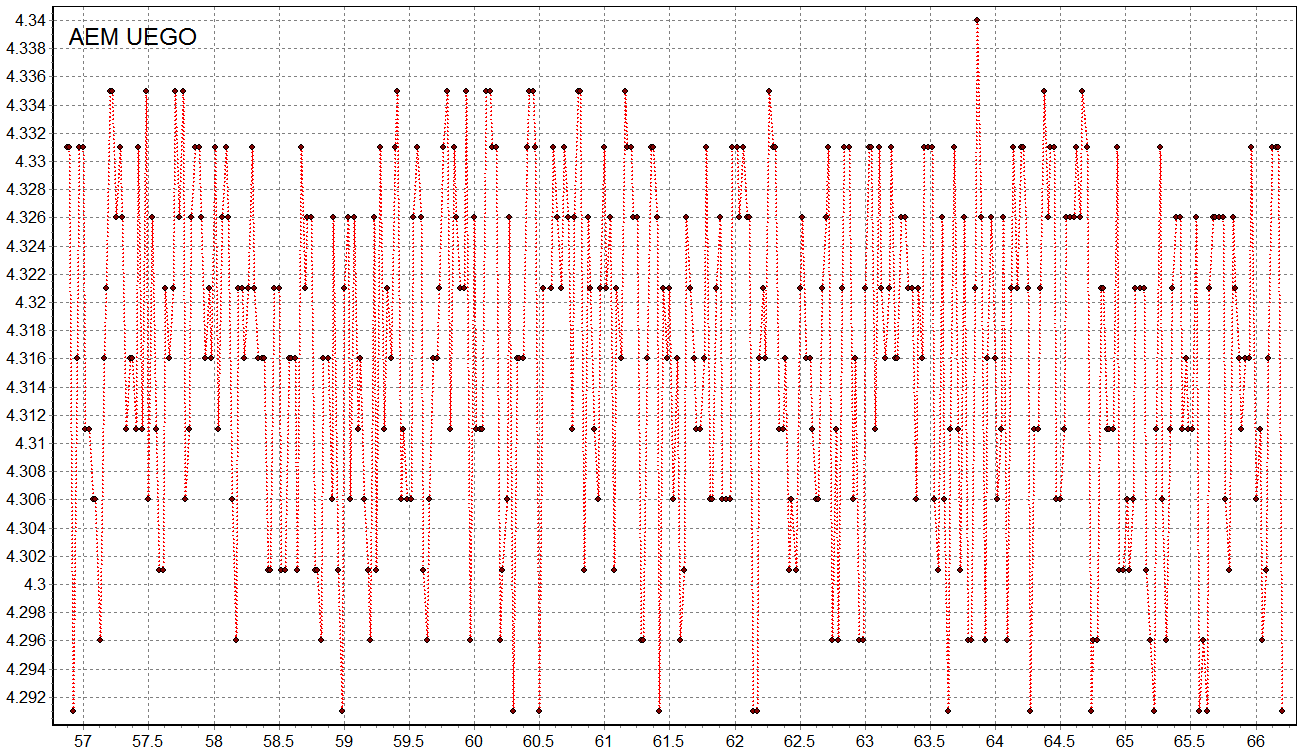
В единственном канале АЕМ дисперсия достигает +-5 дискрет измерения.
Среднеквадратичные отклонения для строк 2284:2620 файла лога составляют:
Innovate - канал 1 0,068578
Innovate - канал 2 0,06611
AEM - 0,303983
Причина как мне видится в том, что в Inovate на вывод аналогового сигнала используется отдельный двухкнальный 10ти битный ЦАП analog devices и продуманная развязка от земли, в AEM применено более дешевое решение.
031913.csv исходный файл с измерениями.
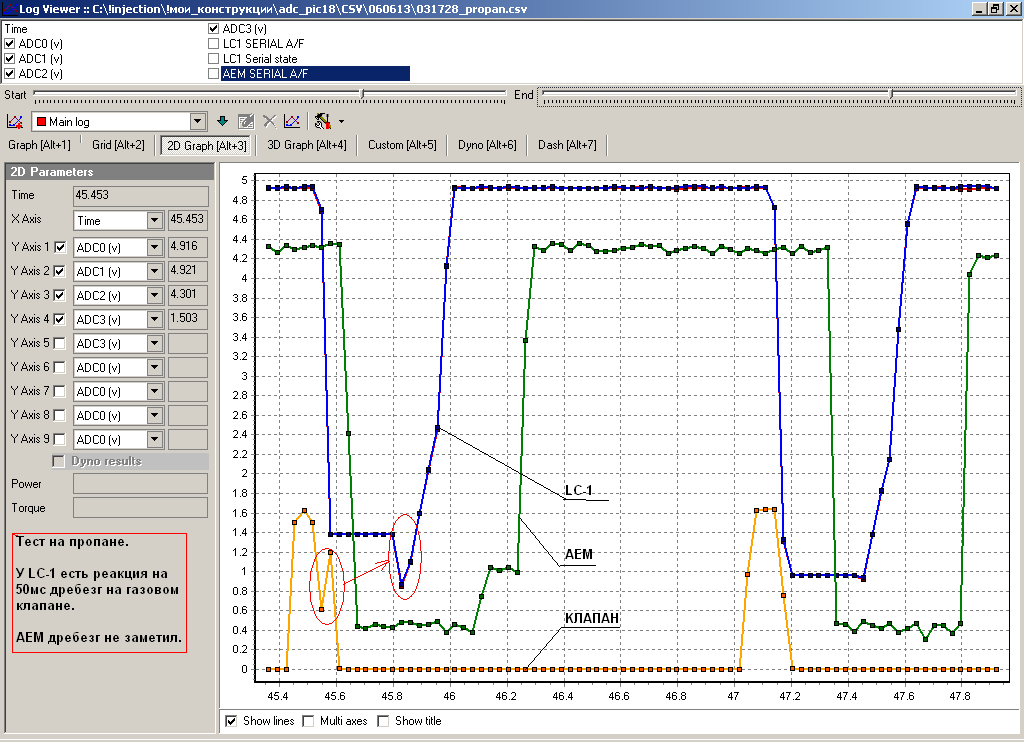
Для этого теста в логер был заведен так же и сам управляющий сигнал клапана (напряжение на клапане через делитель) и несколько уменьшена дискретность времени лога. Далее в ручную симулировался дребезг газового клапана. Реакцию на этот дребезг отражал только LC-1. Сама же реакция на продувку пропаном у АЕМ явно лучше чем на стехиометрию (по видимому PID форсирует) но отставание от инновейта есть и в этом случае как раз наши искомые 150-200мс в первой картинке "рекламы".
В марте 2013 года протокол поддержки сенсоров AEM UEGO был добавлен во все билды ПАК "Матрица", при желании вы можете запросить ПО с такой поддержкой, однако контроллеры ШДК AEM не являются рекомендованными для работы с ПАК "Матрица". Их использование может привести к некорректной работе алгоритмов и возможно потребует изменения констант отвечающих за настройку топливоподачи.
(c) Maxi(РПД) 2013 Копирование материалов ресурса без разрешения автора запрещено.