Задача разработки телеметрии возникла спонтанно в начале сезона Drag Racing 2005 года в процессе доводки автомобиля 2108-РПД командой DTT Motorsport. Доводка автомобиля должна была базироваться на тестах с применением объективных средствах оценки динамических характеристик, технически можно было использовать прибор G-tech PRO SS, однако как показала практика при последовательных замерах его точность была неудовлетворительной, поэтому очевидным решением было разработать собственную телеметрию. Кроме того планировалось создание системы контролирующей пробуксовку ведущих колес. Система разрабатывалась и отлаживалась на протяжении октября 2005 года ударными темпами.
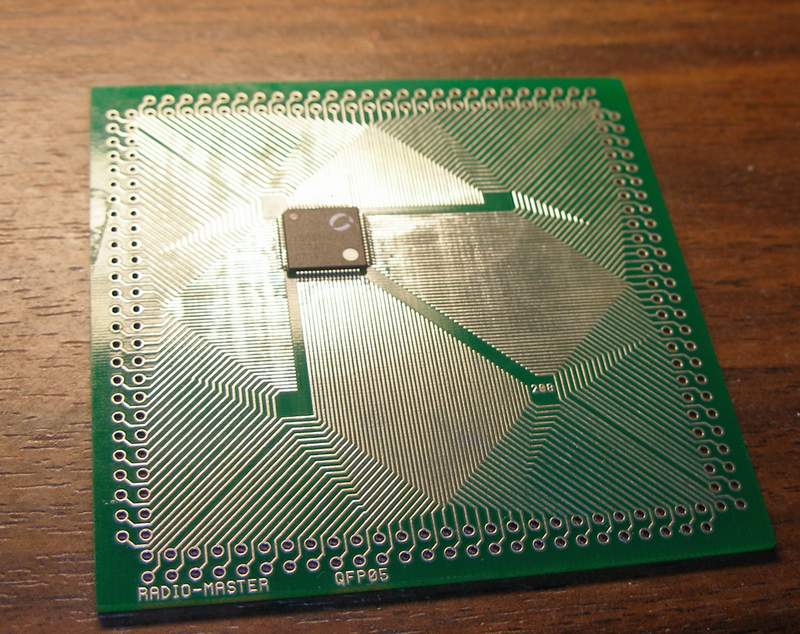
Сердцем системы являлся однокристальный микроконтроллер C8051F023 производимый фирмой Silicon Laboratories. Микроконтроллер работает с тактовой частотой 14745600гц, что обеспечивает ему производительность около 14mips. (для сравнения ЭБУ Январь-7.2 - 2.66mips). Микроконтроллер имеет развитую систему периферии, что позволило реализовать практически всю обработку датчиков аппаратно с использованием модулей захвата. Поскольку микроконтроллер не имеет математического сопроцессора - 32-х разрядная целочисленная арифметика необходимая для решения задач расчета скорости и пробуксовки была реализована программно. Программирование микроконтроллера осуществляется внутрисхемно по интерфейсу JTAG.
К микроконтроллеру по протоколу I2C подключена энергонезависимая память 24C512 объемом 64к для оперативного сохранения результатов заездов и настроек системы.
Для связи микроконтроллера с ПК используется стандартный последовательный порт RS232 в асинхронном режиме 9600:8:N:1. согласование уровней RS232-TTL осуществляется посредством ИМС MAX232.
В качестве датчиков угловой скорости колес были применены решения аналогичные применяемым в современных системах АБС. Индуктивные датчики взяты от ГАЗ 3110 (передние) и ДПКВ ВАЗ-2112 (задние). Для ускорения процедуры разработки системы и обхода всех возможных "граблей" было принято решение позаимствовать входные каскады обработки сигналов с индуктивных датчиков из блока АБС фирмы BOSCH, с древнего автомобиля БМВ-5 где они были выполнены на специализированной ИМС разработанной BOSCH. Микросхема вместе с ее аналоговой обвязкой была переставлена в модуль управления и ее цифровые выходы были подключены непосредственно к микроконтроллеру.
Для участия в соревнованиях были спроектированы и изготовлены специальные стальные перфорированные тормозные диски толщиной 7мм. Применение подобных дисков позволяло одновременно решать множество задач:
1) Снижение общей массы автомобиля (экономия порядка 8кг).
2) Уменьшение момента инерции колес автомобиля.
3) Коэффициент трения колодок по стали как правило выше, чем по чугуну, что позволяло развивать больший тормозной момент.
4) Часть диска служит реперной областью для датчика угловой скорости.
Поскольку циклические торможения в DRAG Racing отсутствуют и нет ограничений на выбор фрикционных составов для колодок - теплоемкость диска и площадь рассеивания не имеют значения! Первое же испытание дисков показало их великолепную работоспособность, и возможность их дальнейшего практического использования.
Устройство управления имеет разъем для стыковки с собственной оригинальной проводкой, являющейся частью моторной проводки, куда подаются следующие сигналы:
- Напряжение питания из бортовой сети автомобиля (8-17v 0.2A)
- 4 входа с индуктивных датчиков угловой скорости колес.
- Вход "положение дросселя", аналоговый.
- Вход "обороты двигателя", дискретный.
- Вход "состояние сцепления", дискретный.
- Вход "Впрыск закиси азота - кнопка", дискретный.
- Выход "пропуск воспламенения", дискретный.
- Выход "разрешение закиси азота",дискретный.
В финальной версии системы 2005 года были реализованы следующие алгоритмы:
- Время на пути 402м. дискретность 1мс. Путь автомобиля рассчитывался по числу оборотов ведомых колес. Время - внутренней подсистемой времени.
- Скорость на выходе 402м. Рассчитывалась как мгновенная угловая скорость ведомых колес в момент пересечения воображаемой линии финиша.
- Разгон до скорости 100 км/ч. дискретность 1мс.
- Обороты двигателя. Получаются путем заполнения интервала поворота двигателя на 180 градусов импульсами частоты 230400гц (период 4.34мкс) и деления константы 6912000 на полученное в результате такого заполнения количество импульсов, ошибка в определении оборотов при равноускоренном движении эксцентрикового вала составляет не более 0.17%.
- Положение дросселя. Считываются с среднего вывода ДПДЗ встроенным в микроконтроллер АЦП. Калибровки начальное положение и множитель для дросселя задаются в окне монитора, и могут быть оперативно подстроены при переносе системы на другой двигатель.
- Состояние входов (Кнопка "Закись" и сцепление).
- Максимальная скорость автомобиля достигнутая в заезде.
- Среднее время переключения передач (для каждой передачи) (анализ ускорения от передачи и состояния сцепления).
- Тормозной путь автомобиля. (м). (анализ пути от скорости по лог)
- Путь пройденный каждым колесом автомобиля.
- Угловая скорость каждого колеса автомобиля на каждом отрезке пути.
- Коэффициенты пробуксовки ведущих колес автомобиля LF/LR, RF/RL, работа самоблокирующегося дифференциала автомобиля (LF/RF)
Приоритет 0:
- Определение пробуксовки по левому борту автомобиля.
- Определение пробуксовки по правому борту автомобиля.
- Определение пробуксовки ведущих колес друг относительно друга (работа дифференциала повышенного трения).
- Определение оборотов двигателя.
- Определение скорости автомобиля.
- Определение состояния автомобиля (остановлен,или движется) и переходов между состояниями.
- Определение общей пробуксовки, как фактора управления потерями момента двигателя.
- Программа "Traction" (потери момента двигателя на основании пробуксовки ведущих колес)
- Расчет пути автомобиля и отсечка момента 402м.
- Определение положения дроссельной заслонки.
- Программа "Закись азота".
- Программа "Launch". (потери момента двигателя на 1 передаче при старте на основании оборотов двигателя).
- Задача сохранения параметров в энергонезависимой памяти.
Приоритет 1:
- Таймер 1мс - обеспечивает тайминг любых событий в системе с дискретностью 1 мс.
- Связь с компьютером.
- Определение угловой скорости и пути для каждого колеса автомобиля.
Теоретические аспекты работы системы.
Скорость автомобиля при равномерном прямолинейном движении может быть выражена функцией угловой скорости его ведомого колеса V=w * Rk где w - угловая скорость колеса, Rk - радиус качения.
В свою очередь радиус качения может быть определен как Rk=Rst + F1(w) где Rst - статический радиус колеса, F(w) функция угловой скорости колеса, учитывающая изменение нагрузки на колесо при действии подъемных (прижимающих) сил на ведомую ось в процессе движения автомобиля а также функция центробежных сил в самом колесе. Rst - для каждого автомобиля с конкретным колесом константа, которая определяется типом и размерностью резины и статической нагрузкой на ведомую ось.
Таким образом для любого ведомого колеса V=w * const * F2(w) при этом значение F2(w) может быть легко получено прямыми измерениями зависимости Rst от статической нагрузки на ось, а центробежная составляющая измерением веса покрышки.
Для ведущего колеса формула несколько сложнее поскольку она должна учитывать момент передаваемый на колесо, однако в данной версии системы используются упрощенные модели, поэтому значения скорости ведущего колеса вычисляются по тем же принципам, что и у ведомого, но с другими коэффициентами (на автомобиле колеса спереди и сзади разные).
Текущая включенная передача является функцией оборотов и скорости. GEAR=F(RPM/V).
Коэффициент пробуксовки - это отношение скоростей колес на разных осях Kt=Vf/Vr
Желаемые потери момента для Traction могут быть выражены как Nloss = F(time,Kt,V,THR,RPM,GEAR....) Настройки алгоритма позволяют определять допустимый порог пробуксовки колес, фактически алгоритм представляет собой ПИД регулятор где П И Д коэффициенты являются функциями оборотов, дросселя и передачи, а ошибка - разницей текущего и желаемого коэффициента пробуксовки.
Для Launch вместо потерь задается ограничение оборотов как функция времени RPMlim=F(time).
7 октября 2005 года система была смонтирована на автомобиль, первый же запуск показал, что при полном дросселе устройство может держать обороты двигателя на любом значении от 1000 rpm, при этом факел пламени от выхлопной трубы создаваемый несгоревшим топливом достигал 1 метра.
12 октября - Киевское шоссе, пилотировал Дима 3x3. Тестирование пробных программ Traction, в программу тестов входила первоначальная тарировка системы с использованием GPS модуля и поверка результатов по километровым столбикам.
14 октября - Горьковское шоссе, пилотировал Дима 3x3. Тестирование пробных моделей Launch, поиск оптимального закона ограничения оборотов при старте на 1 передаче.
15 октября - Горьковское шоссе, пилотировал "Профессор". Тренировка. Лучший результат 13.5c(177) 5.5c(100)
15 октября - Киевское шоссе, пилотировал Дима 3x3. В режиме телеметрирования на мокрой дороге была проверенна различная резина из имеющихся (дождевая гудиер и сухая avs). По мокрому гудиер опережала "еку" в среднем на 1 секунду.
22 октября - параллельная дорожка в Тушино,пилотировал Профессор. Цель тестовых заездов - определение конкурентных характеристик свежесобранного двигателя ВАЗ-415 и настройка системы traction control на покрытие и резину.
Результаты 3-х последовательных заездов по параллельной дорожке c подбором коэффициентов для Traction (режим launch отключен):
13.5c(169) 5.3c(100)
13.2c(175) 5c(100)
13.1c(173) 4.9c(100)
Финальный заезд (машина легче на 65кг - это мой вес ;)) первый боевой выезд:
13.1c(177) 5.1c(100)
Система сработала четко - на старте Профессор пытался прогреть колеса, но она не дала ему это сделать провалив все попытки побуксовать. В результате оказалось, что продвинутой системе мы забыли сделать банальный выключатель. ;)
На этом работы по развитию системы 1-го поколения были остановлены. Однако правильные выводы из всех ошибок были 2005 года по конструкции драгстера все же были сделаны, что позволило в 2006 году ускорить более тяжелый кузов ВАЗ-2110 минимум на 1 секунду по отношению к 2005 году, а также дало неоценимый опыт который будет использован при разработке системы traction второго поколения.
1) Полностью адаптивная без необходимости ручной подстройки. Все конечные настройки при смене резины должны быть введены автоматически.
2) Для определения реальной скорости автомобиля используются акселерометры, а не индуктивные датчики, что снижает себестоимость системы и упрощает ее реализацию.
3) Система реализована как дочерняя плата к эбу Январь-5-7 с микропрограммой J5LS, размещенная в корпусе ЭБУ с собственным процессором обработки информации.
4) Доводка системы планируется на 2007 год.
Сердце системы - микроконтроллер на макетной плате.
Тормозной диск переднего колеса с реперной областью.

Датчик угловой скорости колеса.
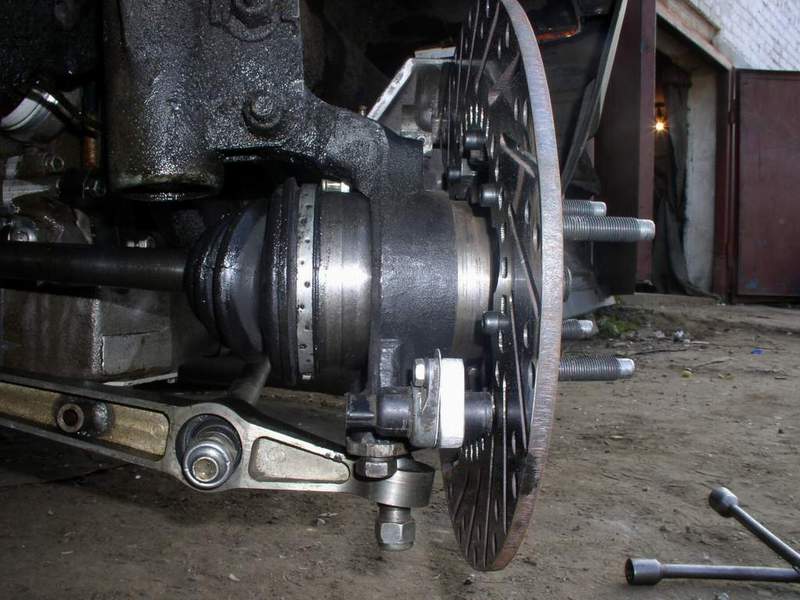
Датчик состояния сцепления.

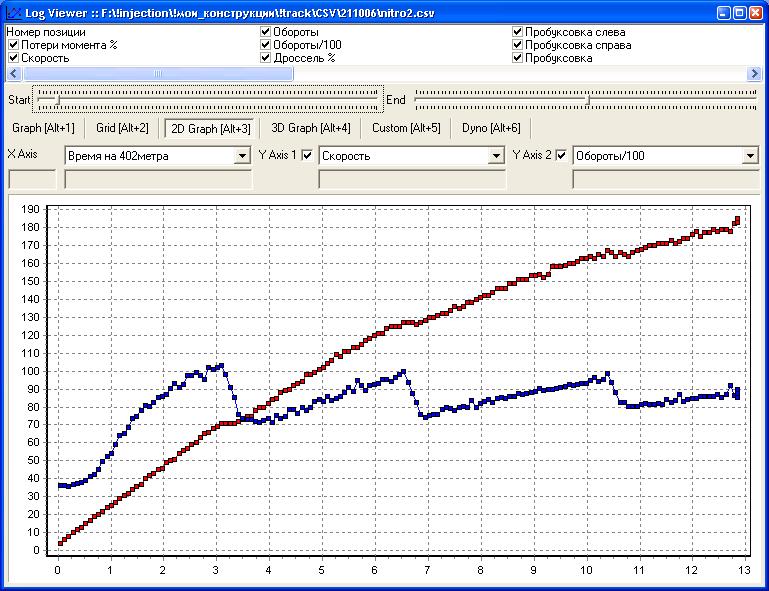
Пример графика - "Время - Обороты - скорость" полученный на тестовых заездах на полигоне в подмосковном городе Серпухове. Автомобиль 2110-РПД ВАЗ-415 , разгон до 100км.ч - 4.9c; время на пути 402м - 12.85c Диапазон оборотов двигателя - 7500-10000, средние потери времени на переключениях передач - 0.5c, скорость автомобиля на выходе - 185 км.ч
Программа для снятия логов.
Работы по модернизации системы были проведены в августе 2007 года для решения задачи управления длинной впускного тракта роторного двигателя. Изменение длинны обеспечивает шаговый двигатель с ременной передачей к движущемуся лафету, шарнирно связанному с дудками изготовленными из ПТФЭ с высокой точностью, обеспечивающую подвижность конструкции "труба в трубе".
Контроль текущего положения лафета в рабочей зоне движения (150мм) обеспечивает потенциометрический датчик линейных перемещений производства английской фирмы - PI Research PN: 01G-233036. Контроллер подает на датчик опорное напряжение 5v, положение считывается встроенным в микропроцессор АЦП. Дискретность определения положения в данной реализации составляет 0.58мм на шаг АЦП.
Желаемое положение лафета задается в калибровках устройства как функция оборотов двигателя target=F(rpm). и может быть быстро изменено в мониторе системы. Кроме того реализован тест позволяющий задавать и менять желаемое положение в ручную.
На основе разницы желаемого и текущего положения лафетов контроллер устанавливает на выходе дискретный сигнал "направление" и вырабатывает определенное количество импульсов "шаг" которые поступают на контроллер шагового двигателя, при этом для преодоления момента инерции покоя контроллер обеспечивает разгон шагового двигателя путем управления периодом импульса "шаг", и таким образом увеличивает момент на валу двигателя в момент начала движения конструкции.
Контроллер шагового двигателя обеспечивает полное управление двигателем по 2-м дискретным сигналам включая стабилизацию тока и формирование необходимых последовательностей управления, контроллер питается от источника тока с напряжением 28в.
Поскольку недавно в продаже на одном из сайтов появился клон этого устройства - я решил написать сюда еще парочку абзацев, и предостеречь вас от лишних трат денег... Так вот суть в том что это все красиво выглядит но ничего из этого не работает! Это только лишь путь - но он ни делает машину ни на долю секунды быстрее. Конечно в каких то запредельно идиотских условиях (гонки по воде или по льду) на этом можно выигрывать. Но в нормальных всегда действует правило:
Если вы буксуете - вы уже все проиграли!
Странно что в наше время эту простую мысль надо кому то объяснять... В драге в принципе не применимы методики управления движением автомобиля с обратной связью оперирующие "ошибкой" или "отклонением" как понятием поскольку в момент когда у вас появилась эта ошибка в виде значительной разницы скоростей колес и покрытия - вы уже все проиграли. выключайте свет сливайте масло ;) Именно по этому никто не стал дальше развивать тему с датчиками на всех колесах - потому что кроме проблем в изготовлении она ничего никому никогда не давала.. Поэтому в следующей версии мы использовали методики прямого (модельного) управления движением реализованные в J5LSDV46 (иж) в 2008 году и позже перекинутые в J5Sport2 (Кузовкин).
P.S. В момент написания статьи я прекрасно знал, что это путь в тупик. Странно что через 8 лет народ все еще заходит в этот тупик. ;) наверно настало время писать, что было дальше.